
Sitemap
A list of all the posts and pages found on the site. For you robots out there, there is an XML version available for digesting as well.
Pages
Posts
Future Blog Post
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Blog Post number 4
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 3
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 2
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Blog Post number 1
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
portfolio
projects
Remote Control of a Dialysis Machine - Fall 2021
Design of a non-invasive remote monitoring and control system that retrofits dialysis machines
with robotic manipulators. 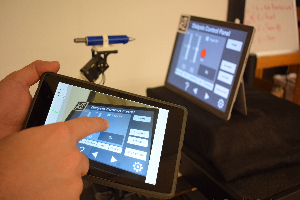
An AR Framework for Handheld Devices to Communicate Force Intent and Receive Visual-Force Feedback
An AR‐enhanced human–robot interaction framework on a touchscreen tablet that uses a virtual arrow to convey and visualize users’ force intentions (location, direction, and magnitude) to a robot manipulator.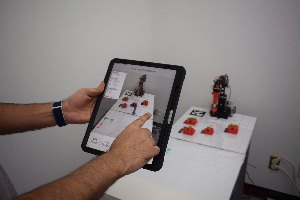
A Handheld Mixed-Reality Framework for Egocentric Perception and Human–Robot Collaboration
The proposed system supports spatially registered interaction between a human operator and a collaborative robot during pick-and-place and stacking tasks. The MR-App enables a user to define, visualize, and verify manipulation goals directly within the robot’s workspace using an egocentric mobile interface.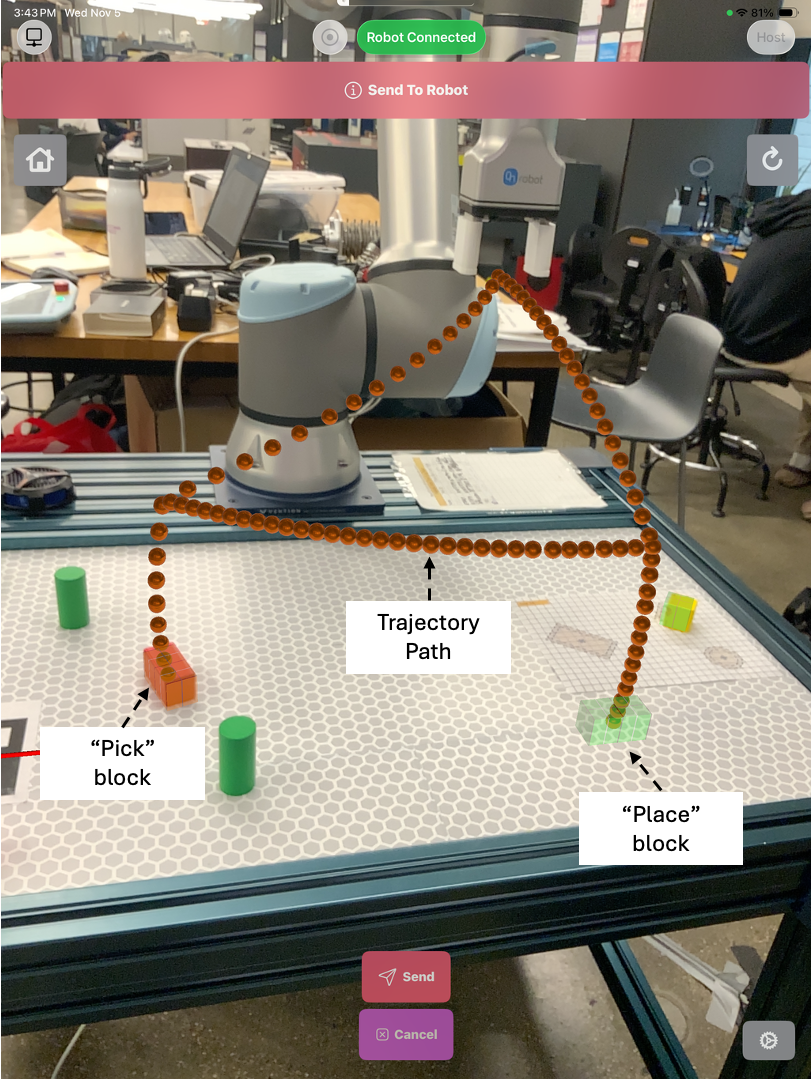
publications
A COVID-19 emergency response for remote control of a dialysis machine with mobile HRI
Published in Frontiers in Robotics and AI, 2021
This paper introduces a non-invasive remote monitoring and control system that retrofits dialysis machines with robotic manipulators, allowing healthcare workers to operate touchscreens via a live-streamed tablet or desktop interface. An accuracy evaluation and comparative user studies of touch- versus click-based modes showed similar low task loads and usability—with click interactions yielding more consistent performance—leading to proposed refinements that enhance visual fidelity and user experience.
Recommended citation: Wazir, H. K., Lourido, C., Chacko, S. M., & Kapila, V. (2021). "A COVID-19 emergency response for remote control of a dialysis machine with mobile HRI. " Frontiers in Robotics and AI, 8, 612855.
A Professional Development Program using a Low-Cost Exoskeleton Kit to Support Trainers in Translating Technical Research to Implementable Recommendations
Published in ASEE Annual Conference & Exposition, 2022
In this paper we present a weeklong professional development workshop that combines social‐capital and cultural‐historical activity (CHAT) theories with project‐based (PBL) and 5E instructional models, using a low-cost 3D-printed exoskeleton kit to help robotics researchers craft implementable training materials for occupational therapists. Through hands-on assembly, capability mapping, and structured mentor–protégé interactions, participants learn to translate technical research into accessible, practice-oriented recommendations
Recommended citation: Lourido, C., Su, H., & Kapila, V., A Professional Development Program using a Low-Cost Exoskeleton Kit to Support Trainers in Translating Technical Research to Implementable Recommendations "2022 ASEE Annual Conference & Exposition", Minneapolis, MN, USA, 2022
Download Paper
Using Capability Maps Tailored to Arm Range of Motion in VR Exergames for Rehabilitation
Published in 46th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), 2024
In this paper we introduce a VR-based rehabilitation system that models a user’s upper‐limb kinematics to generate personalized “capability maps,” enabling tailored, game‐like therapy programs. By adapting exercises to each patient’s physical limitations—and emphasizing specific joint usage—the platform both engages users and objectively tracks their progress over time.
Recommended citation: Lourido, C., Waghoo, Z., Wazir, H. K., Bhagat, N., & Kapila, V. (2024, July). Using Capability Maps Tailored to Arm Range of Motion in VR Exergames for Rehabilitation. In 2024 46th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (pp. 1-4). IEEE.
Download Paper
talks
Talk 1 on Relevant Topic in Your Field
Published:
This is a description of your talk, which is a markdown file that can be all markdown-ified like any other post. Yay markdown!
Conference Proceeding talk 3 on Relevant Topic in Your Field
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
teaching
ASTAP Cía. Ltda.
Project Coordinator, 2012
At the Esmeraldas Refinery in Ecuador, I led a critical hydrogen reciprocating compressor replacement project overseeing every phase from foundation work and mechanical parts procurement to sensor integration and operational readiness testing. I managed cross-functional teams against tight milestones and translated complex engineering manuals from English to Spanish to ensure accurate installation and safe, compliant operation.
Proyectos Integrales del Ecuador PIL S.A.
Automation Engineer, 2013
I developed and deployed PLC and HMI applications across oil & gas facilities in Ecuador, California, and Texas, designing control logic from detailed philosophy documents and integrating equipment and sensors for real-time SCADA monitoring. I also collaborated on the migration of Safety Instrumented Systems (SIS) from legacy to modern PLC platforms to boost safety and reliability, and provided routine SCADA/HMI maintenance to ensure maximum uptime.
Heroeng Cía. Ltda.
Founder and CEO, 2015
We developed a proprietary repair method for mechanical seals exposed to highly corrosive formation water, cutting client maintenance and repair costs by delivering effective seal refurbishments at a fraction of the price of new parts. Over eight years, I spearheaded all business functions - client acquisition, P&L management, technical service delivery, and strategic planning—to drive sustained growth and operational excellence.
Applied Control Engineering
Automation Engineer, 2020
I optimized testing procedures for critical control loops and Safety Instrumented Systems (SIS) in a chemical plant, significantly boosting operational reliability. I also led HMI display upgrades—migrating from Simatic WinCC Step7 to ABB 800xA across multiple facilities—to modernize interfaces and improve system efficiency.
Apple
Video Engineering Intern, 2022
I architected and explored the performance of a real-time image-degradation detection system, leveraging a 3D-CNN model and built an end-to-end data pipeline in Python (PyTorch + OpenCV) that curated, annotated, preprocessed, and augmented a large-scale video dataset.