Remote Control of a Dialysis Machine - Fall 2021
Design of a non-invasive remote monitoring and control system that retrofits dialysis machines
with robotic manipulators. 

Design of a non-invasive remote monitoring and control system that retrofits dialysis machines
with robotic manipulators.
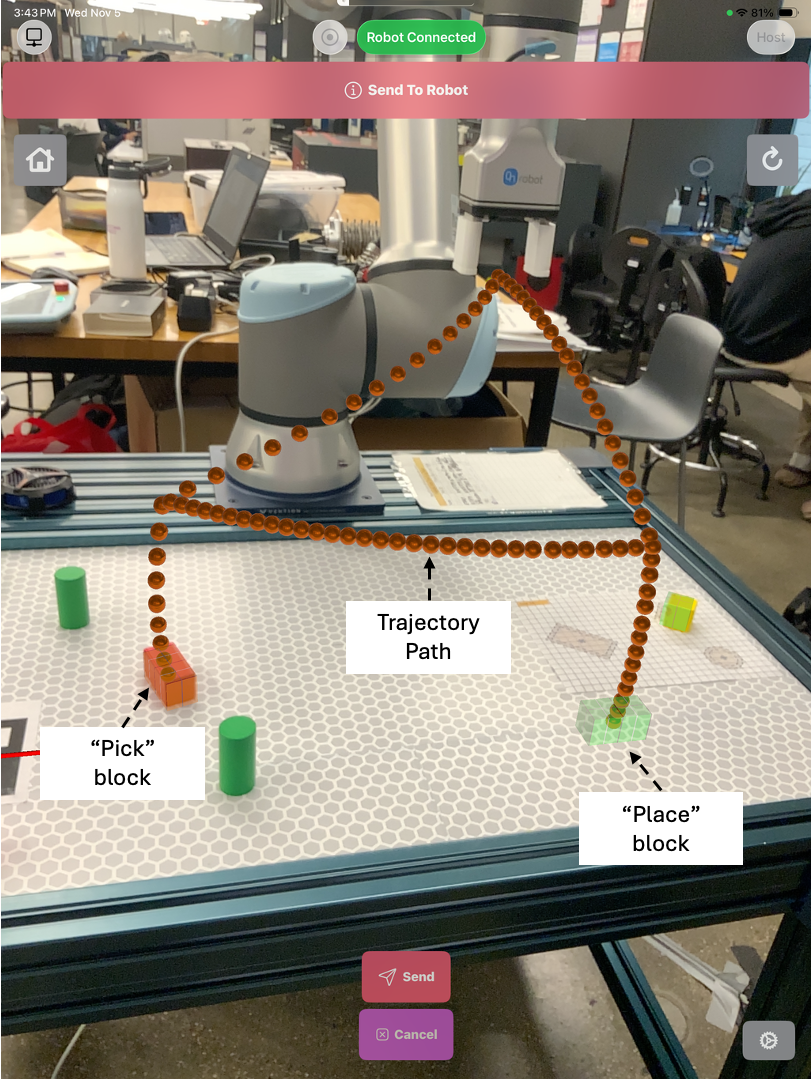
An AR‐enhanced human–robot interaction framework on a touchscreen tablet that uses a virtual arrow to convey and visualize users’ force intentions (location, direction, and magnitude) to a robot manipulator.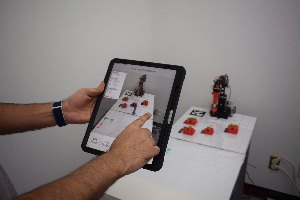
The proposed system supports spatially registered interaction between a human operator and a collaborative robot during pick-and-place and stacking tasks. The MR-App enables a user to define, visualize, and verify manipulation goals directly within the robot’s workspace using an egocentric mobile interface.